徐州重型陈向东:起重机智能化技术探讨
2017/03/27 16:12第一工程机械网

一、作业智能化技术
1、智能臂架技术
根据工况自适应控制,实现精准吊装;主动施工风险分析,进行安全管理;
为了避免吊装过程中可能存在的难题,提供了智能技术模式:
①地面模式:在伸缩和变幅过程中能够保证吊钩距地面的高度稳定
②臂头模式:在伸缩过程中能够保证吊钩与吊臂末节臂臂头之间的距离稳定。
起吊重物时,自动计算纵向偏移量,无需操作复合动作,保证垂直起吊。
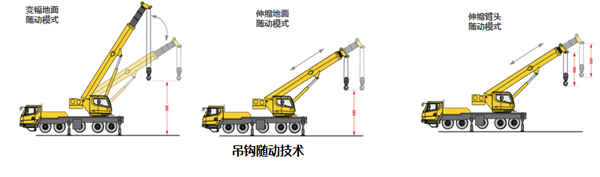
吊钩随动技术

变幅补偿控制技术
2、智能作业
作业工况复制技术:记忆操纵工况规律,自动控制起重机动作复制或操作导航。在第二次做同样的动作时,按下开始键即可重复动作。
起重机一键收展车:只需要设定对应的工况,一键操作达到指定工况,也可以自动收车。
3、互联网远程操控技术,主要提供灵活的操作方式:
起重机移动终端操控技术:通过PAD、手机等遥控起重机,提供灵活的操作平台;
远程操控起重机:通过模拟操纵台、互联网远程控制起重机,满足特种场地施工。
4、多机协同技术
对于吊装行业来说,2台以上起重机对大型构件的抬吊、平移、翻转、旋转,是非常谨慎的工况。
因此,对每台起重机垂直吊装和载荷合理分配的控制策略,主吊的操作意图、辅吊的无人操纵跟随策略的获取至关重要。

4台徐工起重机协同吊装350吨铁狮子
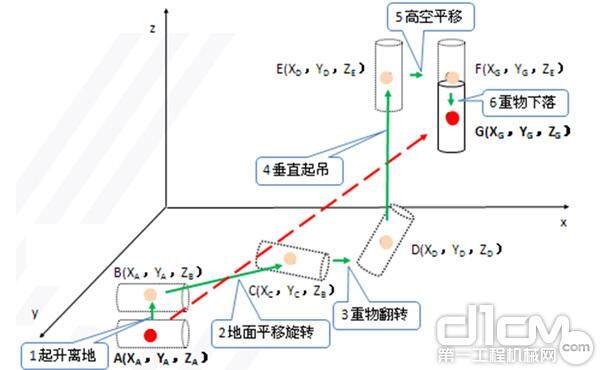
多机协同吊装的路径模型
责任编辑:Daisy

买车卖车 养车维修 疑难故障 学大招
扫码加群 BOSS团同行好友等你交流
|收藏本文
相关阅读
+加载更多新闻




热门推荐