索佳精品案例:索佳测量机器人,基坑监测弄潮儿!

2020年12月,位于武汉的某万达广场盛大开业:其紧邻国家级湿地公园,具有17万余平米的商业体量,2000余个停车位,数百家人气品牌,成为当地首家品牌最全、业态最丰富的城市综合体,填补了该区高端商业广场的空白。

万达广场效果图
该项目占地53400余平米,为了完成如此宏大的建筑建设,设计单位设计了开挖周长为700余米,面积30000余平的两层地下室基坑。
基坑简单的说就是为建筑基础建设而临时开挖的坑井,基坑施工的效果直接决定了建筑工程的建设进度和质量。基坑工程有着“先理论,后实践”的特点,当前设计和理论都是建立在现有假设条件的基础上。
由于岩土性质的复杂多变和工程计算模型的局限性,使得理论计算结果和实际施工过程数据之间存在较大的差异,因此存在较大施工安全问题的风险,因此目前国内外工程技术人员对基坑监测的工作都非常重视。

施工现场拍图
基坑监测的意义主要体现在以下几点:
1、通过监测可以随时掌握土体和支护结构的内力变化情况,了解周边建筑、构筑物的变形情况,将监测数据与设计预估值进行对比分析,以判断施工工艺和施工参数是否需要修正,达到指导施工的目的。
2、通过对临近建筑物、构筑物的监测可以验证基坑开挖方案和环境保护方案的正确性,及时分析出问题,协助为周边环境的安全制定及时、有效的保护措施,将基坑施工风险降到最低。
3、由于各个建筑所在场地的地质条件、施工工艺和周边环境不同,基坑设计中难以列入各项复杂因素,因此通过现场的监测结果进行分析、研究将监测结果用于反馈优化设计,后续类似项目设计提供改进依据。

万达广场基坑施工平面布置图
基坑基本状况:
该万达广场基坑周边场地整平标高22.5m,基坑开挖深度约11m,采用多级放坡(1:1和1:0.5两级放坡)与钻孔灌注结合的方式开挖。由于本基坑周长长,面积大,挖深深,地质较为复杂,因此被设定为I级基坑。

基坑施工现场一隅(放坡开挖)

基坑施工现场一隅(钻孔灌注桩)
经施工单位与地铁有关单位确认,该基坑周边6号线及其他地铁线路均在基坑施工范围以外;基坑其他周边均在基坑施工影响范围以外。基坑施工现场布置具体情况如下:
东侧:地下室外墙距红线27.5m,钢筋加工棚(宽6m,距东北角约50m),放置于坡顶,距坡顶10m,施工通道(宽8m)东北侧距坡顶约18m,东南侧距坡顶约5.75m。)
南侧:地下室外墙距红线约27.5m,局部有钢筋加工棚(宽6m,距西南角约60m)置于平台上;施工车道(宽6m)距坡顶约4.15~5.65m。
西侧:地下室外墙距红线最近约17.8m,钢筋加工棚(宽6m,距西北角约70处)置于平台上,施工车道(宽8m),洗车槽(距西南角约60m)距坡顶约4.8~10.3m,堆土场(堆土高度不超过3m)距约12.8~18.3m。
北侧:地下室外墙距红线约7.3m~18.3m,中建三局工地临时设施位于红线附近。
为保证本项目基坑施工的顺利进行,综合基坑与周边结构的位置关系与基坑监测规范,监测单位设计了基坑监测项目和设备如下:

施工设备情况
由于基坑大部采用了放坡开挖的方式,因此对基坑坡顶的水平位移和沉降的监测就尤为重要。监测单位在基坑周边设计了坡顶水平位位移与沉降监测点约30个,桩顶水平位移与沉降观测点约10个。此外测斜孔、水位孔及锚杆拉力测点若干。由于基坑周长过长,施工现场的器械人员非常多,使用常规的电子水准仪监测沉降,手动全站仪监测水平位移的方式受到现场环境干扰太大,效率很低,难以满足监测需求。
因此本项目使用测量机器人来同时监测基坑的沉降和位移,节省了监测人力投入,同时减小对现场的影响。
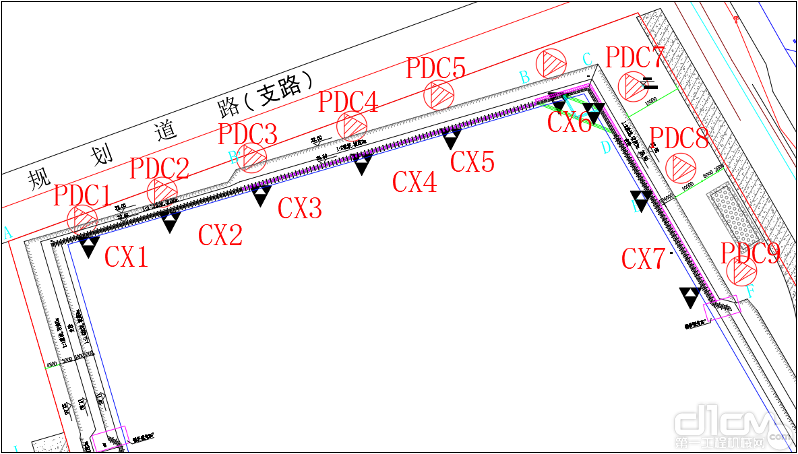
部分坡顶监测点PDC和深部位移(测斜)CX监测点布设示意图
自动化采集
本项目监测点众多,监测单位采用了专业的分布式自动测量单元(MCU),单个采集箱自动采集上报周边最多32支传感器(测斜仪、水位计等)的数据,无需像传统人工方式,使用手动数据采集仪采集。

MCU分布式测量单元
MCU分布式测量单元
按照I级基坑的监测要求,坡顶及桩顶的水平位移、沉降监测的控制值为30mm。按照工程测量规范的要求,监测精度不应低于1/10的控制值,又因为本项目的重要性高,基坑最大观测边长超过了380m,最大测量中误差应不高于1.5mm,监测单位经过慎重考虑后,选择了索佳NET05AXII 0.5″测量机器人来进行监测。

NET05AXII测量机器人
NET05AXII测量机器人
NET05AXII具备对棱镜和反射片的自动照准和跟踪测量能力,测距精度0.8mm+1ppm(棱镜)/0.5mm+1ppm(反射片),完全满足基坑沉降和位移监测的精度需求。NET05AXII还具有IP65防护等级和倾斜改正功能,可以适应基坑现场露天监测环境,配合专用的监测终端完美实现无人值守的自动化观测。
现场实施:
技术支持人员在原定设计的坡顶位移沉降监测点安装了专用监测棱镜。棱镜的安装方式根据现场情况够可以使用地插钢筋焊接或者小型水泥观测墩的方式。本项目中主要采用地插螺丝的安装方法,以减小对施工现场的影响。

监测点地插螺丝安装

混凝土观测墩样式
在巡视了整个基坑现场后,选择了位于基坑西侧项目部旁一处地基硬化处位置作为了测量机器人的设站点,该处地势较高,视野开阔。为了解决基坑施工现场复杂的施工环境导致的遮挡问题,技术人员帮助现场监测部门设计、建设100cm*100cm*200cm的混凝土观测墩。技术人员按照平面控制网的布点要求,选取了基坑影响区域外的四处位置分别建设了基准点。基准点采用小型混凝土观测墩的方式建设,以保证其稳定性。

在技术人员的指导下现场监测部门进行设备调试
由于基坑监测现场环境复杂,施工人员众多,为了避免仪器被盗窃,同时也为了增强设备在野外的防护性能,技术人员协同现场管理部门专门定制了野外防雨防盗棚。防雨防盗棚的开孔根据现场实际情况定制,既能很好的保护仪器设备,又不影响设备的观测。设备直接使用项目部供电,在野外环境下,也支持使用太阳能进行供电。

野外观测棚
本项目使用了索佳NET05AXII高精度测量机器人,对基坑坡体和桩顶的数十个监测点,采用4小时间隔的监测频率进行了持续监测。从基坑开挖直至回填到±0,实现了整个监测流程的无人值守连续观测。是基坑监测实现全自动化监测过程中不可或缺的一环。以“一人看管”取代了常规的水平位移观测小组和沉降观测小组,既保证了监测数据的可靠性,又提升了时效性与频次。
本项目四个多月的监测周期内,NET05AXII在最长监测边接近400米的情况下,点位监测精度始终保持在1.3mm以内,充分证明了索佳测量机器人的实力。
(本文来自:拓普康 索佳)
责任编辑:Yaodl

买车卖车 养车维修 疑难故障 学大招
扫码加群 BOSS团同行好友等你交流

拓普康索佳:五分钟带你了解测量机器人监测项目如何选择设站方式
我们之前探讨过测量机器人监测项目中的一些减少误差提高监测精度的方法,还探讨过如何判断测量机器人监测项[详细]2024-05-09 10:01