PWM液压阀在隧道掘进机推进液压系统中的应用

隧道掘进机(T B M)作业环境恶劣,掘进过程中操作人员不仅要根据岩层变化选择不同的掘进速度,还要进行必要的横向与纵向位置调整。上述特殊工况,要求其推进液压系统性能可靠、动作精准。为满足这一要求,在隧道掘进机中多采用控制精度很高的PWM液压阀(又称高速开关阀)对推进液压缸进行控制。
1.PWM液压阀的特性
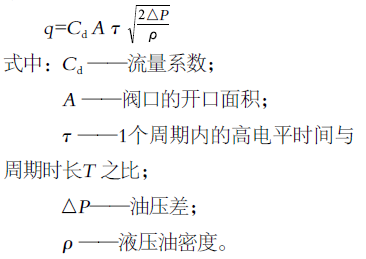
PWM液压阀由脉冲调制器进行控制。脉冲调制器的原理如图1所示。图1a中的U 为经计算机计算后输出的控制信号,V 为计算机输出的另一系列作为载波信号的锯齿波信号。脉宽调制器将输入的锯齿波信号与输入的控制信号比较后,转换为时间周期为T 的脉宽调制信号。如果在某一时刻U值大于V值,则输出高电平,否则输出低电平。根据这一原理,得到图1b中所示一系列控制指令信号。
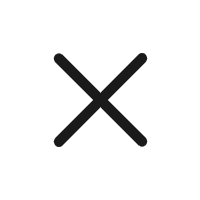
将这一指令施加到PWM液压阀的电磁线圈上,在高电平期间该阀有流量q通过,其余的时间内则无流量通过。由于时间周期T非常小,常为0.01~0.15s,因此常用平均流量q 来表示这一时间内PWM液压阀的输出流量,其计算公式如下:
上式表明,PWM液压阀的流量q与脉宽占空比τ 成正比。脉宽占空比τ 越大,通过PWM液压阀进入推进液压缸的平均流量越大,推进液压缸的运动速度就越快。计算机根据控制要求发出相应的脉宽调整信号,控制PWM液压阀开启或关闭,便可调整推进液压缸液压油流量的大小和流向。
2. PWM液压阀工作原理
执行元件的控制方式有2种:一是开环控制方式,二是是闭环控制方式。开环控制方式是采用数字信号控制伺服阀,从而控制执行元件的运行速度和位移。闭环控制方式过程如下:系统的温度、压力以及执行元件的运行速度和位移等信号反馈给控制器,控制器将该信号与设定值进行比较分析后,输出相应的模拟信号,通过比例阀或高速开关阀(PWM)自动调整执行元件的位置。
图1 脉冲调制器的原理
开环控制方式虽然可以通过发射脉冲信号完成动作控制,但无法补偿因系统温度、压力负载、内泄等引起的速度和位移变化,为此常采用闭环方式对精度要求较高的执行元件进行控制。
采用PWM液压阀控制推进液压缸的工作原理如图2所示,其主要由CPU控制器、转换器(A/D、D/A)、PWM功率放大器、位移传感器、PWM液压阀和推进液压缸组成。PWM液压阀根据脉宽调制信号来调整进入推进液压缸的平均流量,在此基础上,将4个PWM液压阀适当组合,便可自动对推进液压缸的运动方向和位移进行调整。
系统的指令信号与各种监测传感器的反馈信号,由A/D0和A/D1转换成数字信号进入CPU控制器。CPU控制器输出控制信号U,经过D/A转换器转换成模拟信号,再经脉宽调制后进入到PWM功率放大器。
PWM功率放大器的驱动单元D1与D4同步(同时开通或断开),分别与PWM液压阀1、4相连;D2则与D3保持同步,分别与PWM液压阀2、3相连。D1和D4接通时,PWM液压阀1、4处于开启状态,D2、D3则断开,PWM液压阀2、3处于关闭状态。反之亦然。
当U>0时,D1与D4驱动PWM液压阀1、4动作,推进液压缸向右运动。当U<0时,D2和D3驱动PWM液压阀2、3动作,推进液压缸向左运动。当U=0时,推进液压缸运动停止。
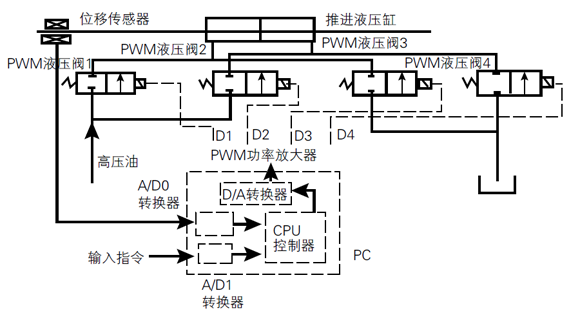
图 2 采用PWM液压阀控制推进液压缸的工作原理
3.应用实例
PWM阀具有结构简单、价格低廉、对控制信号响应速度快和抗污染能力强等优点。缺点是输出流量较小,故其无法直接在高压大流量场合使用。但是将其用于高压大流量锥阀的先导控制,利用其控制精度高的特点,则可对液压缸运动速度和位移精确控制。
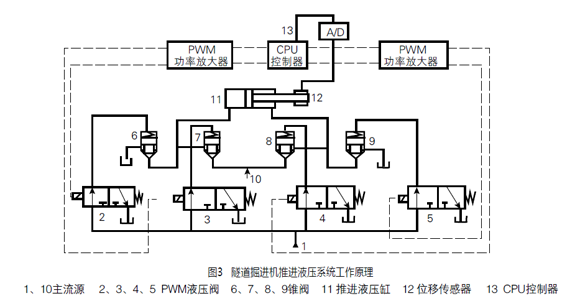
图3 隧道掘进机推进液压系统工作原理
隧道掘进机推进液压系统工作原理如图3所示。当没有输入动作指令时,CPU控制器无信号输出,4个锥阀6、7、8、9截止,推进液压缸11处于闭锁状态。当需要活塞杆伸出时,C P U控制器向PWM功率放大器发出信号,PWM液压阀3、5收到该信号后控制锥阀7、9打开。由于此时PWM液压阀2、4无信号输出,所以锥阀6、8继续保持截止状态。
主流源10经锥阀7进入推进液压缸11无杆腔,推进液压缸11有杆腔的油液经锥阀9流回油箱,液压缸活塞杆便以适当的速度伸出。CPU控制器通过位移传感器12,对活塞的位移和速度进行检测,并与设定值进行比较,以及时修正输入PWM功率放大器的脉宽控制信号。
与此相反,需要活塞杆收回时,在CPU控制器的作用下锥阀7、9处于截止状态,而锥阀6、8则处于导通状态。高压油经过锥阀8进入推进液压缸11有杆腔,推进液压缸11无杆腔的油液经过锥阀6流回油箱,液压缸活塞杆便以适当的速度缩回。
通过以上分析可以知道,隧道掘进机推进系统中液压缸控制主要有以下3个特点:一是系统设计柔性较高,控制管路较少,制造和维护费用较低,运行可靠;二是利用各监测传感器检测执行元件位置信号,可在人机界面上反映设备的实时工况,便于操作;三是控制精度很高,并可对因系统温度、压力、负载、内泄等引起的速度、位移变化自动进行补偿。
责任编辑:David

买车卖车 养车维修 疑难故障 学大招
扫码加群 BOSS团同行好友等你交流