卡特彼勒发动机大全
- 卡特彼勒C15发动机
- 卡特彼勒C13 ACERT™发动机
- 卡特彼勒3516B发动机
- 卡特彼勒C7.1发动机
- 卡特彼勒C27 ACERT™发动机
- 卡特彼勒3512发动机
- 卡特彼勒3508B发动机
- 卡特彼勒3516C发动机
- 卡特彼勒C4.4发动机
- 卡特彼勒C18 ACERT™发动机
- 卡特彼勒C32 ACERT™发动机
- 卡特彼勒3512B发动机
- 卡特彼勒3616发动机
- 卡特彼勒3406C发动机
- 卡特彼勒C27 ACERT™发动机
- 卡特彼勒3516发动机
- 卡特彼勒3512C发动机
- 卡特彼勒3508发动机
- 卡特彼勒C9 ACERT™发动机
- 卡特彼勒3054C发动机
- 卡特彼勒C0.5发动机
- 卡特彼勒C11 ACERT™发动机
- 卡特彼勒C32 ACERT™发动机
- 卡特彼勒C9.3 ACERT™发动机
- 卡特彼勒C4.4 ACERT™发动机
- 卡特彼勒C15 ACERT™发动机
- 卡特彼勒C9.3B发动机
- 卡特彼勒C4.4 ACERT™发动机
- 卡特彼勒3606发动机
- 卡特彼勒C7 ACERT™发动机
- 卡特彼勒C7.1 ACERT™发动机
- 卡特彼勒3612发动机
- 卡特彼勒C13B发动机
- 卡特彼勒C3.6发动机
- 卡特彼勒C2.2发动机
- 卡特彼勒C3.6发动机
- 卡特彼勒C1.7发动机
- 卡特彼勒C0.7发动机
- 卡特彼勒3608发动机
- 卡特彼勒C2.8发动机
- 卡特彼勒C1.1发动机
- 卡特彼勒C1.5发动机
Cat®(卡特)并联发电机组的故障保护操作

在医院或数据中心等对电力需求较高的设施中,发电机组之间的通信对于维持电力水平至关重要。在这些类型的应用中,发电机组通常采用电气连接,帮助管理较大电力需求。这种配置称为发电机组并联,有助于确保网络中更高效的负载分配和负载响应。
使用并联发电机组运行电力系统的一种方法是使用专用的多功能发电机组控制器,在发电机组上集成并联控制。借助 Cat®(卡特)EMCP 4.4 控制系统,各个控制器通过以太网主干网相互通信,通过与单个以太网交换机的连接同步发电机组。
这种并联方法具有成本效益,因为它将分立式并联控制设备和可编程逻辑控制器的功能与发电机组控制相结合,减少了并机柜的空间占用问题,从而降低了项目投资成本。然而,这种方法引起了电力系统设计者和用户的质疑:
如果以太网交换机出现故障并且发电机组无法再通信,会发生什么?
如果来自一个或多个发电机组的链路断开并且这些单元通信中断,会发生什么?
在这种情况下,电力系统是否会继续运行、分配负载,并以安全稳定的方式响应负载变化?
对于配备 EMCP4.4 控制和多发电机数据链路 (MGDL) 的发电机组,答案是肯定的。被称为故障保护自适应负载分配/下垂运行的卡特彼勒专利策略编程在EMCP 4.4 系统中,以便智能地将设备切换到控制方案,从而实现不间断的稳定运行,直至恢复完整通信。通信丢失还会触发报警,提醒操作人员注意这种状况,以便加快维修速度。
了解风险
并联发电机组中传统的通信故障处理方式存在系统不稳定和发动机运行不安全的风险。在对通信故障的标准响应中,设备分为两种模式:下垂和同步。下垂模式的机组自动置于固定的预定目标负载水平,例如标称频率下的50%负载。同步摆动机器,也称为摆动机器,承担大部分负载变化。只有在同步模式机组超过其额定值的100%以上后,下垂单元才开始承受负载。
该控制方案有两个主要缺点。首先,下垂发电机组可能在通信丢失时以不同的负载百分比运行。然后必须立即调整到下垂曲线上的频率和负载。这可能意味着突然增加或减少其燃料,以匹配同步发电机组的频率,从而可能导致系统不稳定和同步丢失。即使系统稳定后,同步组也会因为负载增加而过载。虽然下垂发电机组可以增加更多负载,但这种设计不允许这样做。
这种方式的另一个缺点是不必要地限制了系统的功率容量。摆动机器的输出功率随着负载的变化而变化,同时在系统上保持恒定的速度和频率。下垂单元在固定设置为50%负载时,将始终以特定速度或频率产生相同的功率输出。因此,这类系统的最大可用负载限于摆动机器的组合输出和下垂机器的总固定功率输出。超过该最大值的任何负载都将导致速度和频率降低。如果负载增加到超过此最大可用负载,即使下垂单元的运行远低于其最大容量,摆动机器也可能过载。
此外,在该控制方式下,不允许最小系统负载低于下垂单元的组合固定输出。否则系统频率将增加,并且摆动机器可能变为电动或反向供电。
稳定系统性能
利用 EMCP4.4 的故障保护自适应负载分配/下垂运行方式,通过失去通信安全地保持稳定性,无缝转换到故障保护模式,逐步、稳定地移动到新的平衡点。
在这种方式下,当在规定的时间间隔之后没有接收到来自一个或多个 EMCP 4.4 单元的通信消息时,将触发故障保护模式。通信丢失可能是由于线路断线、配置不当、以太网路由器或集线器设备断电或EMCP 4.4 设备断电等情况造成的。
当通信丢失时,故障模式智能地将一些丢失的单元切换到故障保护自适应下垂模式,而其他单元切换到故障保护同步负载分配模式。在通信丢失期间更新单元的操作模式能够最好地服务于发电机系统。
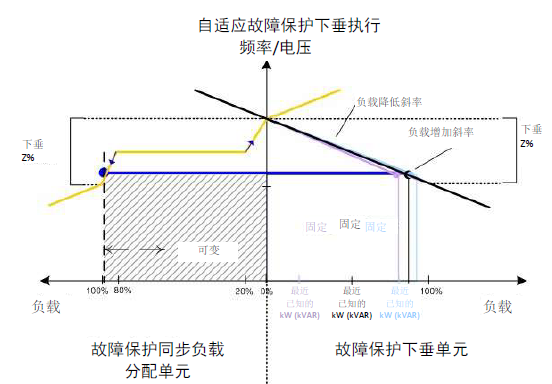
故障保护自适应下垂运行随着时间根据负载的变化而变化,以稳定系统
例如,如果失去通信的单元仍在运行并且在总线上,则必须保证这些单元安全运行。卡特彼勒获得专利的 MGDL 系统运用了网络拓扑方面的知识,这对于丢失的单元而言较为保守。通信丢失导致网络分离。各单元基于以下要素分为同步负载分配组和下垂组:
• 在总预期控件数量中仍然在通信的单元数量
• 最低MGDL 单元数量
EMCP 4.4如何解决网络中的分离问题
根据网络中通信中断的位置,应用四种基本的分离网络方案。
方案1:如果控制器 (例如,单元01)检测到的在线控件数量 (少数)少于预期数量的一半,则少数控件在故障保护自适应下垂模式下运行,并在故障保护自适应同步负载分配模式下保持平衡。
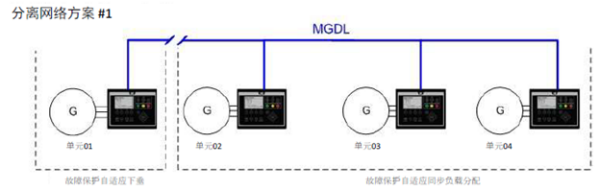
方案1
方案2:如果控制器 (例如,单元01)检测到的在线控件数量 (多数)多于预期数量的一半,则多数控件在故障保护自适应同步负载分配模式下运行,并在故障保护自适应下垂模式下保持平衡。

方案2
方案3:如果控制器检测到网络上的预期控件数量正好是一半,则有两种可能:如果控件检测到最低单元数量,则该单元和其中一半的其他单元在故障保护自适应同步负载分配模式下运行,另一半在故障保护自适应下垂模式下运行。如果控件未检测到最低单元数量,则情况相反。
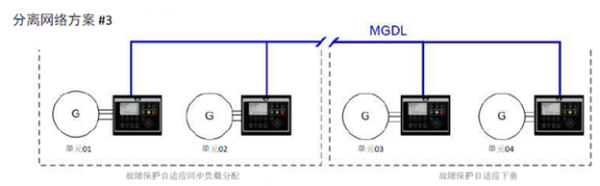
方案3
方案4:如果网络中的多个分离在不同时间发生,则最终可能只有在故障保护自适应下垂模式下运行的控件,而没有在故障保护自适应同步负载分配模式下运行的控件。
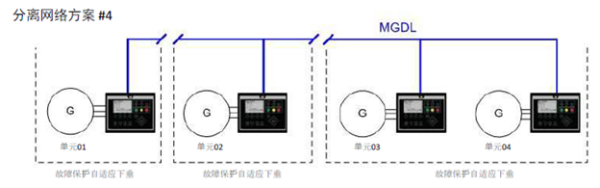
方案4
一个简化示例说明了发电机组如何响应故障保护自适应负载分配/下垂运行控制策略下的通信中断。在这种情况和其他情况下,发电机组遵循程序指令,以平稳地移动到平衡点,系统从该平衡点适当地做出响应,以承担或减轻负载,而不是快速跳到某个预定输出级别。
无论在发生中断时机组是重载还是轻载,控制策略都能使系统适应并保持稳定。机组随着预编程的负载曲线以安全、缓慢的方式平稳地对负载做出响应。此外,与传统的通信故障响应相比,该方法保留了更大的系统负载能力。
在检测到通信中断时,多数组中的发电机组进入修改的同步操作,而少数组中的发电机组进入自适应下垂模式,在其最后负载水平下先要“冻结”。随着负载的增加,增加量被同步单元吸收。下垂单元上的负载不会改变。
随着负载进一步增加,同步单元继续接受高达80%容量的负载。此时,同步单元拒绝承受更多负载,频率下降并且下垂单元承受更多负载。当负载降低时,类似的过程也会发生。
故障保护自适应负载分配和故障保护自适应下垂模式有两种基本效应:
• 使机组无缝切换到故障保护运行模式,同时继续提供负载,最大限度地减少对系统的干扰。
• 通过防止同步单元过早欠载或过载,在机组之间提供均匀的负载分配,以更好地为负载提供服务。
恢复正常
故障保护同步负载分配和故障保护自适应下垂模式仅用于故障保护运行,不适用于长时间的正常运行。虽然在故障保护模式下运行的发电机系统将充分满足系统负载,但正常的 MGDL 负载分配是更可靠、更稳定的运行模式。
故障保护模式启用后,系统需要调查。报警指示何时发生通信丢失。根据报警系统的配置方式,可能采用闪光灯、声音信号、文本消息或呼叫操作员智能手机或其中某些组合的形式。收到报警后,应尽快采取正确的故障排除步骤,使系统恢复正常运行。
负载分配协议旨在实现尽可能无缝地转换到故障保护模式和退出故障保护模式,尽管并不能绝对保证。负载分配增益和系统负载的变化会显著影响故障保护和正常运行模式之间的转换能力而不会产生干扰。
总之,故障保护自适应负载分配/下垂运行控制策略提供了独特的优势,即使在多发电机组电力系统中发生单点故障之后也能提供稳定性。
如果您想了解更多关于卡特彼勒电力产品和解决方案的信息,或您对本文提到的内容想获取更多信息,您可以在公众号对话框里留言给我们,我们会安排专人与您进一步沟通。(关于卡特彼勒隐私声明,请到公众号首页了解更多。)<广告>
(来源于CAT卡特电力服务中心)
责任编辑:Zeshuai

买车卖车 养车维修 疑难故障 学大招
扫码加入BOSS团卡特彼勒挖机群


全球首台!Cat®3516E 6T为显利护航拖轮提供强劲动力
近期,信昌机器成功获得显利护航拖轮项目,为该项目的9条28米护航拖轮,提供18台3516E 6T发动[详细]2023-10-02 20:48



服务电话:400-6800-212
地址:湖南长沙经济开发区(榔梨街道)枫树路203...