为了使液压挖掘机能够在高原地区顺利使用,我们为其配备了高原功率自适应控制系统(Altiplanopoweradaptablecontrol),简称APAC。APAC系统可以有效提高挖掘机在高原上施工的适用能力,避免发动机在高原缺氧时启动困难、动力不足、冒黑烟现象,同时也可达到节能环保的目的。
1.系统构成
(1)硬件
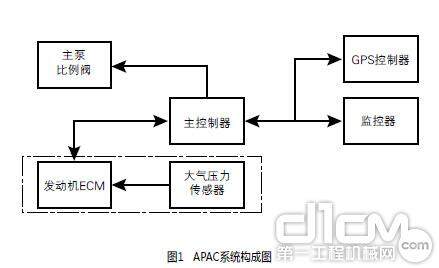
APAC系统主要包括主控制器、监控器、GPS控制器、主泵比例阀、发动机控制模块(ECM)、大气压力传感器。其中监控器、GPS控制器通过底盘CAN总线与主控制器互联。大气压力传感器(发动机进气压力传感器)、发动机控制模块(ECM)通过发动机CAN总线与主控制器互联。所有交互信息通过上述2条总线实时传输。APAC系统构成如图1所示。
2.基本原理
APAC系统先通过发动机控制模块(ECM)读取大气压力值,再通过GPS定位系统读取海拔高度值,从而判断该挖掘机在当前工作地点动力系统功率下降率。然后通过挖掘机主控制器自动调节主泵的输出功率,使主泵功率与发动机功率实时匹配。
配备非电控发动机的挖掘机所用的APAC系统,通过GPS控制器检测海拔高度,并通过总线将海拔高度信息传给主控制器。主控制器根据预先设计的海拔高度与功率下降率关系,调整主泵吸收功率,并将功率下降率转换为具体的PWM控制电流,来动态调整主泵比例阀电流。
配备电控发动机的挖掘机所用APAC系统,通过发动机控制模块设置大气压力传感器,可检测施工环境大气压力值。APAC系统设置的逻辑优先模式,可优先选择发动机控制模块采集的大气压力值,通过预先设定的大气压力值与功率下降关系调整主泵吸收功率,可以达到最佳的自适应控制效果。
3.配置方法
我公司国内销售、配备非电控发动机及GPS全球定位系统的挖掘机,不具备采集施工环境大气压力值的能力。如果再通过加装大气压力传感器来判断大气压力值,就需要额外增加成本。所以,对于此类挖掘机,应采用GPS海拔高度值来判断功率下降率。
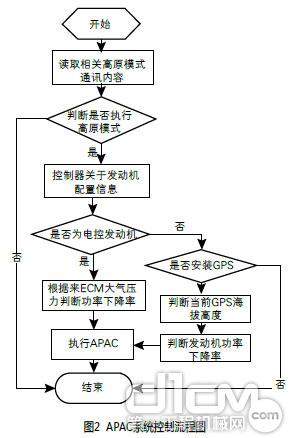
我公司出口型挖掘机一般配置电控发动机,但不配置GPS系统。电控发动机控制模块可以通过安装在发动机进气口的压力传感器,采集到大气压力信号,再通过CAN总线将该信号实时传给主控制器。主控制器通过大气压力值,即可判断发动机输出功率下降率。APAC系统控制流程如图2所示。
理想的APAC系统在不同的海拔高度均能自动调整主泵的吸收功率,以适应发动机实际功率输出的变化。某些挖掘机所用发动机设置的转速感应控制系统(ESS),可在一定程度抑制由于发动机输出功率下降过多而造成的掉速现象。
以康明斯QSM11型电控发动机为例,当该发动机在海拔高度3500m以下运转时,发动机输出功率下降率由转速感应控制系统(ESS)控制。当该发动机在海拔高度3500m以上运转时,海拔每上升1000m功率只下降4%。配备该型发动机的挖掘机,不必采用全程动态调节,可将海拔高度分为2个等级:即在海拔高度低于3500m时,不进行功率下降率调节;在海拔高度高于3500m时,功率下降率分级调节。分级调节时,可按海拔高度每上升1000m功率下降4%的比值,设为固定调节比例。
4.控制调节方法
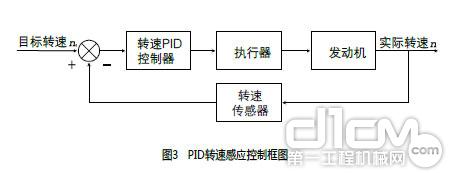
APAC系统主控制器对发动机功率下降率及主泵的控制,采用改进型增量式PID转速感应控制算法,可使APAC系统结构简单、工作稳定、物理量明确、抗变换性强,并可实现稳态无偏差。PID转速感应控制框图如图3所示。
发动机功率下降率不仅受海拔高度的影响,还受温度及天气影响,故预存在主控制器中经验值不能完全适应所有高原环境,需要根据实际情况对功率下降率进行调节。通常,操作人员可通过人机界面对发动机功率下降率进行修改。
当达到预定的海拔高度控制阈值时,APAC系统监控器会弹出是否选择进入自适应控制状态。如果使用者选择“否”,系统将不执行APAC系统控制。另外,操作人员也可以通过监控器直接设置APAC系统控制状态,监控器默认APAC系统控制为不生效状态。
5.数据库建立
不同的发动机对高原环境的适应性不同,完善APAC系统,不仅需要收集不同发动机功率受高原环境影响的资料,还需通过大量的高原实地实验进行数据收集及验证。然后对验证后的数据进行梳理,将功率下降率类似的不同型号发动机的数据再进行整合,简化控制数据,最后形成数据库,作为APAC系统控制依据。
APAC该技术已成功应用于徐工30t级挖掘机上,并实现批量生产,取得了良好的效果,荣获了中国工程机械年度技术创新奖。

 京公网安备11010502049281号 网络视听许可证0113658号 广播电视制作许可证20759号
京公网安备11010502049281号 网络视听许可证0113658号 广播电视制作许可证20759号 客服QQ1355831837
客服QQ1355831837 















